��Ʒ˵��
һվʽ���������Դ���ݷ���ϵͳ֮��Կ��ʽ�������嶯��ѧ����ģ��ϵͳ

��ƽ̨��һ��һվʽ��Կ�� 3-D �˶�������ϵͳ��ּ�ڼ��ɸ����˶���������EMG������ͼ��������̨������ʽ�ܲ���������ʽ¥�ݡ��ִ�������EEG�Ե�ͼ�������Ե�ͼ(quantitative EEG, qEEG)ϵͳ��������Ƶ���¼���Ǻ�����ģ���豸��������ʵ�ʹ����豸Ӳ����ͬʱwanquanʵʱͬ���ռ������ݣ��ӷḻ���������������ɵ����ݿ�����ͨ�����������ͼ����ʾ�� ���˾�̾�� 3D �������Ⱦ�������Ա���Ϊ�Ǽܡ���ʻ������Ρ�����ʹ���г��Ϲ㷺Ӳ��ʵ�ֶ������˶������Ի������������ļ���������������ϵ�����ʵʱ������
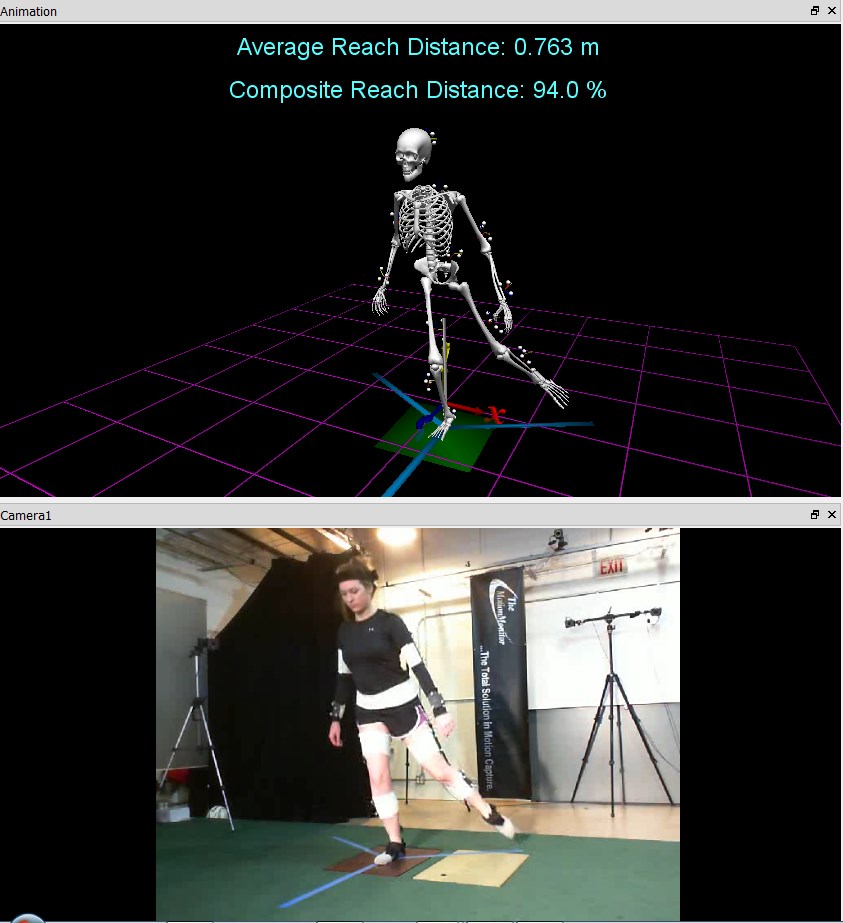
��ϵͳ���Լ��ɺ�ȷ��λ�г����˶����˶���������Ӳ��������wanquanͬ����ȷ����ѡ������Эͬ��������ʹ�õļ������Ⱦ��ͼ����ʾʵʱ���֡�������������ؽ��������أ��Լ��������ͬ�����յ��û�����������Լ��˶��Ͷ���ѧ���ݣ����������϶��»����¶��ϵ��涯��ѧģ�ͼ�����������;ء�Ϊ��du�ص��о������ṩquan�桢ϵͳ���������������ݡ�
���ݿ��ڲ���Ҫ��̵�ֱ�������˵���ʹ�á��û����Ա�д�ű������������ݺ��¼�������ͳ��ģ��һ����չ���й��ܡ�
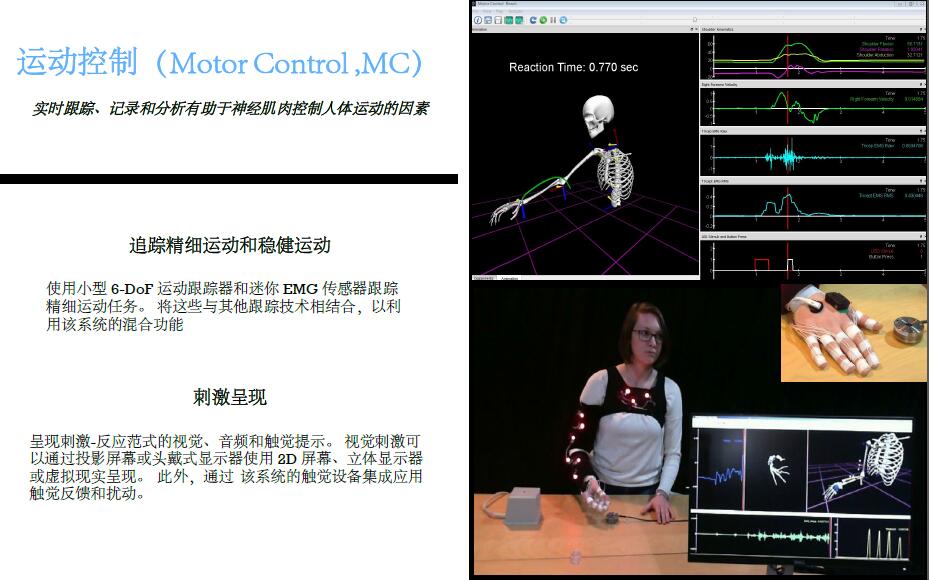
���嶯��ѧ����ģ��������
��������ѧ�ϣ�������Ա�����Ϊ���ڶ���ѧ���Ķ���ѧ����ģ�͡�����������������Ϊ�����IJ��֣���ˣ�����������������еĹ����DZز����ٵ� ��
һ����ָ���ֺ���֫��ѧģ��
�ṩʹ��ʵʱ�������������ݸ��ٺͷ�����ָ���ֺ���֫�˶���������
ѡ����Ķ�����
ʹ�õ�š�������������ѧϵͳ�������ֲ�����֫�˶������ǵ��Ŷӽ�������ѡ���ʺ�������ļ�����
��ѭ�о�����
ʹ�ñ�Э�飨���� ISB ���飩������ؽ����ġ������ֲ�����ϵ�Լ�����ؽڽǶȺ������˶�ѧ���ݡ�
���ٺͷ�����ָ�˶�
������ǡ��ƹǺ�ָ������ڱ˴˻�������������֣���ǰ�ۣ����˶���ʹ�ý��ʱ�־�������ض�������ֲ�ģ�͡�������Զ��ָ�ǣ��� The MotionMotion Ϊδ���ٵ�ָ�Dz�ֵ�������������ṩ���ݣ�ʹ���ܹ����ٵ�Ӳ�������ֲ��˶���
�����
�ڶ��������ʱ���ٶ���Ϊ�����ö�����������������Ŀ�ꡢ������ҳ�桢���ȱ������ݡ�
ʹ�û���˶���ѧϵͳ
�������˶�ѧ������ϵ�һ������˶���ϵͳ�У���ͬʱ����ÿ�ּ��������ơ����磬�����õ�Ŵ�����������ָ�˶������ñ�Ǹ�����������岿λ��
�鿴����
ͬ���ռ��˶������Լ� EMG������EEG ��������ʵ�ȡ�
����ͷ����-���ö�ڶμ�����������ѧģ�������������˶�������ͷ���������ڵ�Ӧ��
Ӳ��
���÷����ǡ�������ǡ�Ī����λ����������Ÿ������� IMU �����١�����ͷ���������������岿λ��Ϊ�����ö�����
Ӧ��
����ƣ�ͻ����˺�����о��ı仯�� ͷ���ͼ������ƵĹ��������������߳����ڼ���˶�ѧ�������ط����������ֵĴ�ʩ��
����
�Ƚ����˻��Ԥǰ������ݡ� ���ӻ�������˶�ѧ������ŷ���ǡ��˶���Χ��λ�ơ��ٶȺͼ��ٶȣ����û�����Ĺ�ʽ�ͱ����Լ�����ļ����ͬ��������
��������
ʹ�ò���̨��EMG��EEG���۶��Ǻͼ��ٶȼ���չ�˶�ѧ�����ռ��� ����ʱ������ƣ���������Ӳ������չ���ܡ�
�����š�����ϥ��-����С�ȡ����Ⱥ�����������λ���١����ӻ��ͷ����ŵĸ���������
����ģ�Ͷ���
ʹ�������еļȶ�Э�鶨������ģ�ͣ����������㲿��Milwaukee �� Oxford ģ�ͣ����ߴ����Զ���ġ��û������ģ����������������
����
ʹ�����������������ٲ�ͬ�Ĺ�ͷ��ŵIJ�ͬ��λ��wu���Ǵ�Ь���dz�š�����ָ�꣬����ǰ��������λ�ƺͷ����Լ��㲿�����С�Ⱥ��������岿λ���Ƚ��˶���
��ʱ����
���ͬ�����˶�ѧ������ѧ�� EMG ���ݣ��Լ��û�����IJ���ֵ��������/С�˶���Χ����Щ����һ��ƽ̨�ϡ�
¼�����������ȡ���ݣ��Ի�ȡ��ʱ���ܷ�����
����
���÷������ܣ������ط�������ڼ������ģʽ�µ�EMG ���ݿ��ӻ����⼤��ģʽ��
CT-MRI��
�ڶ�̬�˶���������CT-MRI ɨ�貢�����ڲ���ǡ�ʹ���ض�����Ĺ����ļ��ͼ���������ǿ���˶�ѧ���ݡ�
ʵʱ���ﷴ��
ͨ���������Ӿ���ʾ�ṩʵʱ���ﷴ������ѵ���ͻָ�����ϥ�ǵ��˶���Χ��
�ġ������ٺ� 3D ���ӡ�ʹ��ʵʱ���ӷ�������չ�о�Ӧ���Լ�������ڼ��ע��������
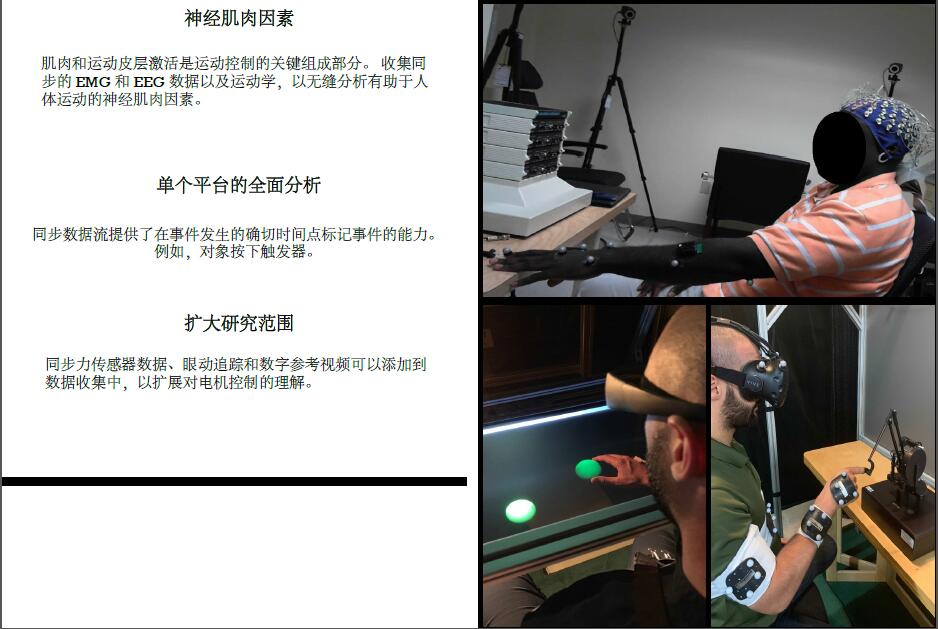
���Ӿ��̼�-��Ӧ��ʽ��
Ӳ��
�������� SR Research �� Eyelink II ͷ��ʽ�۶��ǡ�Tobii�� Pro Glasses 2 �� Tobii ����ͷ��ʽ��ʾ����ʵʱ���ݡ�
���� 3D ����
���÷����ǡ����ǡ�Ī����λ���ٻ��Ŵ����������١������Ͷ��������Ի�ô���ͷ�������IJ���ע�����ݡ�
�������ӽ����
�����κβο�ϵ�е�ע�����ݣ��������硢ͷ�����κγߴ�Ķ���ƽ�棬�Ա�ʾ����ǽ�ڡ��ذ塢����ʾ
�ۺϷ���
ʶ�����Ȥ���¼�������ע�ӻ�ɨ�ӣ�����������������ͬ���������͵Ĺ�ϵ
ͬ��������
�ռ��������鿴ͬ�����ݣ��������ֲο���Ƶ��EMG��EEG�������ݡ��������˶�ѧ�Լ� 3D ����
�塢��϶������������������˶�ѧ������ϳ�һ������˶���ϵͳ����ͬʱ����ÿ�ּ��������ơ�
ѡ�����Ķ�����
ʹ�õ�š�������������ѧϵͳ�������֡���֫����֫���˶������ǵ��Ŷӽ�������������ѡ���ʺ�������ļ�����
��Ч���·���
��Ϸ����ٽ����µĺ������˷ܵ��о����������磬�Ҳࣨ�ײ�����ͼ����ʾ��һ�����ã�����ʹ�ù�ѧ��������ٷ�װ�ı�
�Ρ������ߵ��ز��˶��븽����֯���µĵ�Ŵ�����ͬ�����١����ݶ���ͬһ�ο�֡�б��棬�������������ͣ��� EMG����
��������Ƶ��ͬ����
���������
����һ���˶����������� IMU ����ѧ�����ѧ��������Ը��ٶ������磬��wu����������ʱ������ IMU �����������
�Ρ�
����������ѧģ��
ʹ�ö��������ϵͳ������������ѧģ�͡����磬ʹ�ù�ѧϵͳ�ľ��Ƚ����ʱ�־���ֻ��Զ�������ģ�ͣ�Ȼ��ʹ�� IMU ����
�����ٶ������ʱ�־���ֻ�Ϊ����ؽ����ĺͽڶ����ṩ��һ�ֿ����Ҹ�ȷ�ķ�����
ʹ���Զ�����Эͬ��λ����
�ṩ�˶����ͬ�������˶������������̣����wu���̹���������˶�����ͬʱ���ڶ����Ŀ�������Ҫ��
ÿ��ϵͳ������du������
��������ǿ����ṩΪ����Ӧ�ù������λ���������ѧģ�͵������������������ź�����
Ӳ��
���÷����ǡ����ǡ�Ī����λ����������Ÿ���������������١������Ͷ�����������֣������֡��źͼ����ĸ�������
ǿ��Ŀ��ӻ�
�ۿ�ʵʱ 3D ����������������DZ��ε��˶��� δ���ٵĹ�������Ӧ�ؽ��в�ֵ�Ͷ����������Ա��û����Կ��ӻ�ϸ�ںʹ��Ե��˶���
���Ľ�ģ
���DZ���� CT/MRI ɨ������ֻ����ʱ�־�Զ���ÿ���ڶεijߴ粢���ٹؽ����ĺؽڷ��롢�������������ʱ�־�� ��ѭ ISB �����Э�飬���Զ��屾������ϵ��
�ۺϷ���
�Ƚ�����ǰ������������ݡ� ���ӻ�������μ����ݣ�����ŷ���ǡ��˶���Χ��λ�ơ��ٶȺͼ��ٶȣ����û�����Ĺ�ʽ�ͱ����� �Զ�����ӻ�������ʱ�����л�����ͼ�������켣�ͼ������������
��������
ʹ��ͬ����Ƶ��չ�˶�ѧ�����ռ������Force/Torque ��������MT S ��Instron �������豸��ȡ�����ݡ� ������ʱ����Ӳ������չ���ܡ�
�ߡ����⽨ģ������ֱ�Ӵ�ʹ�� The xGen �ļ��ɼ���ģ�ͣ��ɼ����˶������ݷ����������������ء�
�����������ߵļ�����ά���͡�״̬����ӦDZ����ָ��Ӷ����б������ʺ��������͵��˶���������ȷ�������⼡���ƣ�Ͷȣ���⼡��ƣ�ͻָ��������Ҫ��ʱ�䣬�Ӷ���ѧ�����ƶ�ѵ���ƻ���ǿ�ȣ����Ӳ����пɷ����ó����������༡���Ƿ�Գƣ�״̬�Ƿ����������˶�Աѵ�����DZ���ǰ��������˷��գ�����������ߴ����κ��˺���Ӱ�죬���������˺�ֱ��ѡȡ���˲�λ�õ����˼���ľ�����Ϣ��������Ϣ�����Ժ�ȷ�жϼ�������������ƶ������ƻ����̣��������̿�������Ҫ��ʱ��
��ģ�������
ֱ�ӴӴӱ�ǡ�I M U����Ÿ������� C 3 D �ļ��ռ����˶������������ɼ���ģ�͡�
�û��Զ��� & ����ģ��
���� O p e n S i m ģ�ͣ��������Լ���ģ�ͻ�������ģ�͡� ʹ�����������е�����ʹ����ģ���ض�������
���ݷ����Ϳ��ӻ�
�Լ���Ӧ����ɫ�Ͳ������Կ��ӻ�ļ��ˮƽ�����Ƶ��������������˽ⵥ���������Թ������� �Ƚϼ������غ��ⲿ�ؽ����ء� ͨ�������ڲ������������ܹؽ����ص��ܺ��������Ż���������
�����
ʹ�������е��ռ������� ��ϵͳ�������ڸ�ϵͳ���ռ����˶�ѧ�Ͷ���ѧ�������ӵ�����ģ�;�̬�Ż����� �Ż����
�����û�����ά�������ͼ�ν��н�ģ�����������Ͳ����Լ�����Э�����������ģ�Ͱ������������⡢�ؽڡ��ʹ������������û�ͨ��ͼ�ν�����ݵ������ṹ�ľ��ȱ�ʾ����Щģ�Ϳ�������ģ���κ��������˶����粽�С������г����ܲ�����Ծ�����غ�Ͷ����
-
�������������C���Ե����˶����ļ�(C3D��TRB��TRC)���лطźͲ������������Դ��˶�����ϵͳʵʱ�������ݣ����ڲ�������ʱ������άģ�͵Ķ�����
-
��̬�����C�˶����湤�ߴ���һ���˶��ı��棬������̬����Щ�������ƽ��ֵ����ƫ������ݱȽϡ����ڲ�̬���棬�ù����㲽̬�¼������Զ�����¼���˶���Ϊ���Ҳ�����������ʽ����Excelͼ�����Ա��ڱȽϻ��о����ݡ�
-
�ű��C�ű�����ʹ������ִ�нű����Լ���ģ�ͺ��˶����ݡ�ִ�ж�̬ģ���Լ�������ͼ�ͱ��档�ű�Ҳ�����ڱ��湤�����ã��Ա��´�����������ض�ģ��ʱ�ָ���Щ���á�
-
ģ�������C����ʵ�ó������ݾ�̬�˶�������IJ���������Զ�����ͨ��ģ����ƥ���κγߴ�ĸ��塣��������·�����ڵ�ģ����������������岿�ֽ������š�
-
��������C�û����Խ����������塢��Բ�塢Բ�������ӣ��Թ����⼡��ִ��������������·��������Щ�������Զ����㣬�Ӷ�����Ϊ�����ļ��⾫�ȼ��㼡�ⳤ�ȡ��������˶��ֱۡ�
-
�ֳ�ֱ���CֻҪ������κ����Է����仯���������Ե�ʵʱͼ�ͻ���¡��������û������۲��ƶ����ŵ㡢���ƶ�����κ��������ԶԼ��ⳤ�ȡ����ۺ�����Ӱ�졣
-
���������C�û����Խ�����Ť�����µ���״����ģ��������͵Ĺ������Σ����ֹ�Ťת��ɹ�ǰ�㡣
-
��Ƶ����/�����C�˶�������Ƶ�������˶������ڼ䵼�벢��������Ļ�ϲ��š���ʹ��ģ�Ͷ�����ʵʱ��Ƶ�ıȽϱ�����ס���ƵҲ���Դ�ģ�ʹ��ڵ�����AVI�ļ���
-
��Ƥ�C��Ƥ��ָ���ӵ�һ���������岿�ֵ���ά����α��档ͨ�����ӵ�һ���������岿�֣�����ʹƤ���ڹؽ��ƶ�ʱ���Ρ�Ƥ�������ڱ�ʾ����Ƥ����������桢�ʹ����������档����Ҳ������������ͼ��Ⱦ������ǿ��ʵ�С�
-
ͼ��ʹ���߽����C���µ��û�����Ԫ��ʹ��ģ�ͽ����Լ����Ĺ���������������������ʾ���Ա�����ס���ϵͳ����֧�֡��Ϸš����������ɼ���ģ�ͻ��˶����ݣ���ִ�����ӹ��������нű��ȹ��ܡ�
-
OpenSim�������C������OpenSim���ӣ�OpenSim��һ����Դ����ϵͳ�������û������Ͳ����˶��Ķ�̬ģ�⡣OpenSimͨ���ṩ����Ķ���ѧ���ԣ�����������ٺͼ��㼡����ƣ���չ�˸�ϵͳ�Ĺ��ܡ�OpenSim���Ե���͵�����ϵͳģ�ͣ������û�����������Ӧ�ó���Ĺ��ܡ�
�ˡ������͵����ṩ���ڶ�������Ӳ���������Ľ�Կ�װ������������͵���רҵ��ʿ�������������ơ�
�š��˶�ƽ����������������������������ѧ�����ı仯����⼡��ļ���������о���֯
�ص㣺
1����������
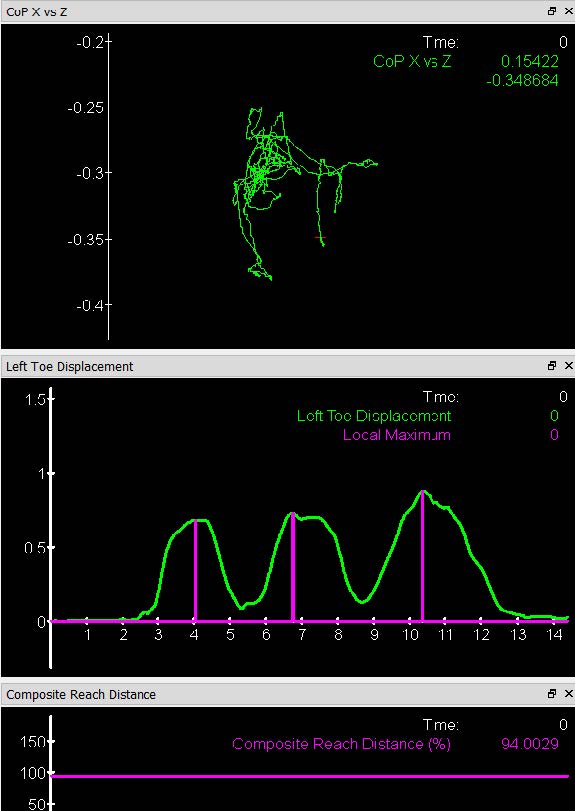
���ͬ��ѹ�����ĺ��˶�ѧ���ݣ��Լ��û�����IJ���ֵ�������ֲ���quan�ִ�/Сҡ�ں��˶���Χ�� ʵʱ�ṩ����Ϣ���Ա�Ϊ�����������ṩ��ʱ�ı��ַ�����
2��ʵʱ���ﷴ��
ͨ���������Ӿ���ʾ�ṩʵʱ���ﷴ�����Ը��ٺ���չ�κ����岿λ���˶���Χ�� ��⼡��ļ����ʱ��ʹ������Ż�ƽ����ԡ�
3������������
ͨ��ͬ���Ե�ͼ���۶��١����ֲο���Ƶ��������ʵ�ͼ���ͼ��չ�˶�ѧ�͵����������ռ����Ե���������ƽ������ƿ��Ƶ��������ء� ������ʱ������Ӳ������չ���ܡ� ����Դ������ͬ���ռ���Ҳ����ͨ��������ť��du�ռ���
4������
���� ��ϵͳ �ķ����Է������ܣ������غͷ���ά�������Ը������������ȶ��ԡ�
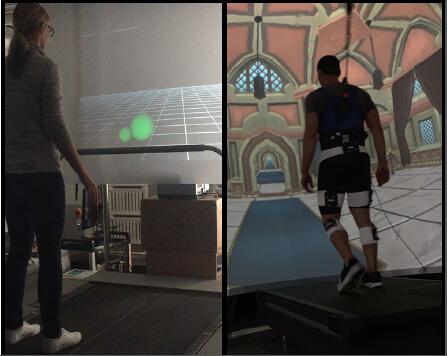
5����̬�ܲ�������
ʹ�� ��ϵͳ ��˫��ʵʱ�ӿڿ��� Bertec ���DZ��ܲ������Կ���Ƥ���ٶȡ� �����˶�ѧ������Ƥ���ٶ��Խ����Զ��������к��ܲ������������ռ��ڼ�Ӧ���û�������Ŷ����������ƿ���
ʮ���˶�����
ʮһ������EEG�Ե�ͼ�ǣ��ṩͬ������ͷ��� EEG �� qEEG ���ݵ�����
Ӳ��
�������� BioSemi �� ActiveTwo EEG ϵͳ��ANTNeuro �� eego EEG ϵͳ�� MindMedia �� Nexus qEEG ϵͳ��ʵʱ���ݡ�
ʵʱ���ӻ�
�����ݲ���֮ǰ���ڼ�ʵʱ���ӻ��������� EEG ͨ���� �ڳ�ʱ���¼�ڼ���������������ȷ���������õ� EEG �� qEEG �źš�
ͬ���ɼ�
�� EEG �������˶�ѧ��EMG���۶��١�����������Ƶ���ݼ��ɲ����� ʹ�ø��ִ������Զ���ʼ��ֹͣ�����ռ���wu���ͷ����ʼ���͡�ֹͣ����ʾ��
�¼����
�����û�������¼���ʶ�� EEG �����е���Ȥ�㡣 ����ʹ���κδ������������ʹ�üĽ���ʽͼ���������¼���
���ﷴ��
ʹ���κδ�������������������ﷴ���� ʹ�� qEEG ��Ϊ���𡱹�꣬���� 1��2 �� 3 ά������г�����Ƶ���Ӿ���ʾ�� �����ڽ���ʽ���ﷴ����ѵ�ڼ�ؼ�¼ EEG ���ݡ�
����
������ﷴ��Ŀ����ֵ���Լ��������ݣ��� EEG���˶�ѧ������ѧ��EMG���۶��ٵȡ� �� ASCII ��ʽ����ԭʼ�ʹ������������Թ���һ��������
ʮ��������EMG����ͼ����Electromyography�ṩ��������������ͬ�����֡��ɼ��ͷ���ʵʱ EMG ���ݵ�������
�Ӹ���ϵͳ���ռ�
ʹ�ø��������̴ӱ��������ģ�� EMG ϵͳ�������ݡ����� �� Noraxon �� Delsys EMG ϵͳ�����ּ��ɣ�ͨ�� USB�ռ����ݡ�
�ۺϷ���
�ṩquan������ݷ������ܣ����������͵���ԭʼ���ݺ�RMS ���ݵ���������ʱ���Ƶ���в鿴�͵��� EMG ���ݡ�����ƽ������ֵƵ����Ϣ��ʹ��ȥ��ֱ��ƫ�Ƶ�������Ҳ����Ӧ���û�������ݲ��˲�����
���ﷴ��
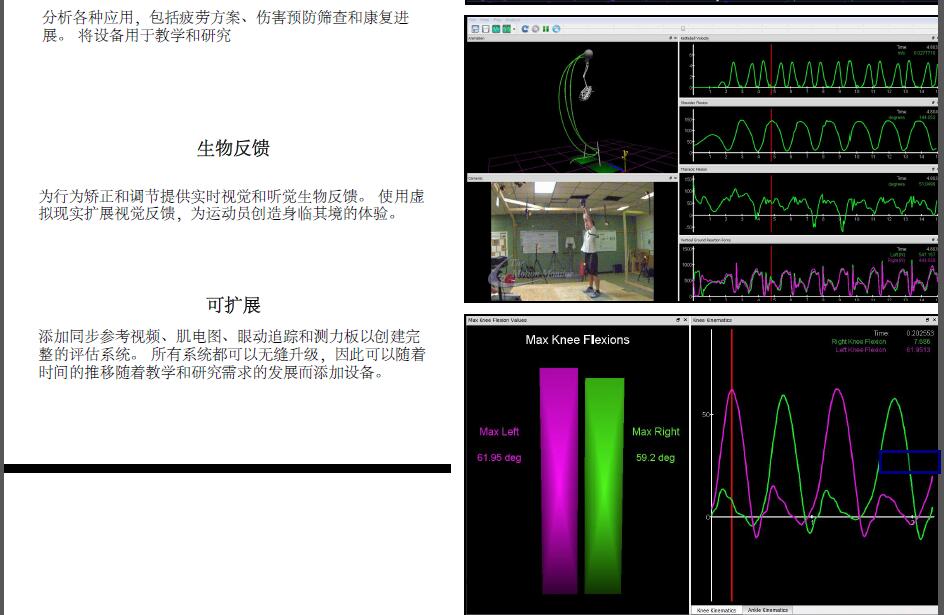
���������ڸ���������Ļ��ͷ��ʽ��ʾ���Ͽ��ӻ��� 3D Ŀ��ͳ�����Ŀ������Բ��ö�����ʽ����������ͼ�е���������������κδ����������Ϳ��ƣ�����ԭʼ�������� EMG ���ݡ�ͨ��ʵʱ��ͬ����������ʾ�������������ܲ���ǿ���ﷴ���������磬�Ҳ��ͼ����ʾ��������� EMG RMS ��ʵʱ��ʾ����������������ﷴ��Ŀ����ֵ���Լ��������ݣ����˶�ѧ������ѧ���Ե�ͼ���۶��ٵȡ�
......
���ࡢ��ϸ����������ѯ��Ʒ���ʣ����������绰18618101725

�ҹ�˾����ͬһվʽϸ����֯����������ѧ�������ӡ������ҽѧ���̿��з���-10�꾭��֧��,
|